Im Zuge der Diskussionen rund um Digitalisierung wird auch immer wieder die Thematik angeschnitten, das Maschinen doch entscheiden können und wir Menschen Angst haben müssten, das irgendwann einmal, wahrscheinlich in gar nicht so ferner Zukunft, Maschinen Macht über uns erlangen werden. Digitalisierung in Unternehmen bedeutet aber mitnichten Technologisierung “auf Teufel komm raus”, sondern Technik sehr bewusst in bestimmen Bereichen einzusetzen, mit dem Ziel, dass Menschen sinngekoppelter im Kontext von gemeinsam vereinbarten Sinn und Zweck denken und agieren können. Dieser Beitrag soll ein erster Schritt sein, die gefasste These tiefgründiger zu beleuchten. Wir starten mit dem Entscheiden.
Gibt es bereits Maschinen, die entscheiden können?
Um sich dieser Frage zu nähern, ist es unerlässlich das Wort “Entscheiden” zu definieren. Was verbinden wir mit “Entscheiden”? Was bedeutet “Entscheiden”? Ich könnte jetzt natürlich eine Definition anbringen und mich dafür vielleicht den Kognitionswissenschaften bedienen. Das werde ich deshalb unterlassen, da ich die Erfahrung gemacht habe, das diese Herangehensweise mehr Fragen aufwirft als sie beantwortet. Ich nähere mich dem Thema Entscheiden auf Basis eines ganz einfachen Beispiels, was wir alle kennen, das Einparken eines Autos, und werde in diesem Zuge den Begriff differenzieren.
Die erste Lernphase (Lernen_0)

In der obigen Abbildung erkennen wir eine für uns wohl allseits bekannte Situation. Wir möchten mit unserem Auto parallel zum Gehweg auf der Straße parken. Die mögliche Parkfläche ist umrahmt von bereits zwei dort parkenden Autos. Es gibt ja bereits heute schon Parkassistenten in Autos verbaut, die diesen Vorgang automatisch für uns erledigen. Was genau muss dieser Parkassistent können und was passiert während des Parkvorganges?
Am Auto sind mehrere Sensoren angebracht, die von der Umwelt Daten messen und diese speichern. Diese Daten habe ich aus Gründen der Vereinfachung und Fokussierung auf drei reduziert. Es ist Abstand des Wagens zum Gehweg (y), die Lage des Autos im Vergleich zu den parkenden Autos (x) sowie die Lage in puncto Parallelität des Autos zum Gehweg (Winkel α).
Das Auto wird von einem Menschen aus verschiedensten Startpositionen in die Parkfläche befördert. Während dieser Vorgänge messen die Sensoren die oben angegebenen Parameter. Diese werden dann zusammen mit weiteren wichtigen Steuerdaten, wie beispielsweise Einstellwinkel Vorderrad oder Geschwindigkeit des Wagens, in einer so genannten Look-Up Tabelle gespeichert. Diese Tabelle enthält also sehr viele Datensätze, die genau angeben, was der Mensch im Auto bei bestimmten Positionen des Autos getan hat (Gas geben, bremsen, Lenkrad einschlagen etc.).
In dieser Phase geht noch keinerlei Aktivität selbständig vom Parkassistenten aus. Deshalb wird diese Phase als “Unterwiesenes Lernen” betitelt.
Die zweite Lernphase (Lernen_1)
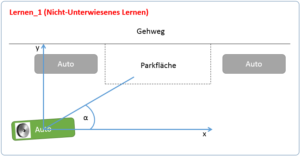
In dieser Phase findet das Auto mittels des Parkassistenten selbständig den Weg in die Parkfläche, auch aus Parkpositionen heraus, die vorher nicht trainiert worden sind, wo also keine korrespondierenden Datensätze in der Tabelle existieren. In diesem Sinne wird die Tabelle also mit Datensätzen automatisch vom Parkassistenten ergänzt. Diese Phase wird dementsprechend als “Nicht-Unterwiesenes Lernen” bezeichnet, weil der Mensch hier seine Finger nicht im Spiel hat.
Die dritte Lernphase (Lernen_2)

Nun wird es interessant. Was passiert, wenn ein Hindernis auf dem Weg zur Parkfläche steht, welches dazu führt, dass das Auto die Parkfläche nicht erreichen kann. Was würde der Parkassistent zurückmelden? Genau, Fehler. Er kann die Prozedur nicht erfolgreich ausführen. Wozu müsste der Parkassistent in der Lage sein? Er müsste selbständig die Look-Up Tabelle um Spalten erweitern, beispielsweise um das zu umfahrende Hindernis mit den entsprechenden Abmaßen, damit dafür dann wieder Daten gemessen und gesammelt werden können. Des Weiteren würde der Parkassistent auch nicht “auf die Idee kommen”, aus sich heraus die nächstgelegene Parkfläche anzusteuern. Er würde einfach nur einen Error melden, das Auto würde stehen bleiben und auf den Menschen warten. Dieser Phase hat man den Namen “Kognitiv-Volitives Lernen” verpasst, die allerdings für eine Maschine, an diesem kleinen Beispiel eindrücklich dargestellt, unmöglich zu durchlaufen ist. Denn.
Welcher entscheidende Unterschied ist hier zum Lernen_1 auszumachen? Beim Lernen_2 müsste der Parkassistent von sich heraus den Algorithmus, also den Source Code, ändern, nicht nur die Input- und Outputdaten, wie bei Lernen_1. Das ist derzeit in vielen technischen Anlagen bereits erfolgreich umgesetzt, nicht nur beim Parkassistenten im Auto. Lernen_2 nicht. Genauer genommen sind wir von einer Realisierung solcher Maschinen noch meilenweit entfernt. Darauf möchte ich aber in diesem Post nicht weiter eingehen, da diese Ausführungen die heutige Thematik sprengen würden. Gerne verweise ich dafür auf einige meiner Post im Zusammenhang mit der Polykontexturalität, die der leider vergessene deutsch-amerikanische Mathematiker und Philosoph Gotthard Günther erfunden hat.
Die eingeführten Begriffe “Lernen_…” wurden übrigens von Gregory Bateson, ein angloamerikanischer Anthropologe, Biologe, Sozialwissenschaftler, Kybernetiker und Philosoph, im Rahmen seiner Lerntheorie eingeführt.
Können Maschine entscheiden?
Nein, können sie nicht. Fassen wir noch einmal kurz zusammen, um dann auf das Thema Entscheiden zu lenken und damit das “Nein” zu begründen.
Lernen_0 steht für Prozesse, bei denen weder der Algorithmus noch die zur Verfügung stehenden Daten geändert werden. Es wird einfach mit ihnen gearbeitet. Lernen_1 steht für adaptive Prozesse, bei denen die Maschine Daten entsprechend der vorgefundenen Situation ändert und auf dieser Basis dann agiert. Der Kontext, in dem die Maschine agiert, bleibt der selbige, da der Algorithmus nicht eigenständig angepasst werden kann. Im Einparkbeispiel ist der Kontext “Bewege das Auto in genau diese Parkfläche”. Die Maschine kann den Kontext nicht ändern in “Suche die nächstgelegene freie Parkfläche” oder “Wenn die Sonne scheint, kann ich auch nach Hause fahren, da dann der Autobesitzer zu Fuss laufen kann.” Ihnen fallen bestimmt beliebig viele Kontexte ein, die sie in solch einer Situation als Mensch bedienen könnten. Die Maschine kann das aber eben nicht. Sie agiert monokontextural. Sie kennt immer nur den Kontext, den ein Mensch ihr vorher eingetrichtert hat.
Wir erkennen jetzt wahrscheinlich auch, warum Lernen_2 als kognitiv-volitiv bezeichnet wird. Es geht in dieser Lernphase nämlich um das Anpassen des Kontextes, in welchem eine Situation wahrgenommen werden und darauf reagiert werden soll. Es wird quasi auf einer Metaebene (Erweitern der Look-Up Tabelle) der Optionenraum erweitert, auf dem dann Entscheidungsoptionen generiert werden, die dann letztendlich zu einer finalen Entscheidung führen. Die Maschine agiert einzig und allein auf vorgefertigten Entscheidungsoptionen und wählt dann aus diesen aus. Ich würde also sagen, dass eine Maschine nicht entscheidet, sondern auswählt. Wenn man einer Maschine vorgibt: “Tue A oder B”, dann tut sie genau “A oder B”, aber eben nicht “C”.
Jetzt kann man wahrscheinlich auch sehr gut den Spruch des österreichischen Kybernetikers Heinz von Förster einwerten, der da sagt.
Nur prinzipiell unentscheidbare Situationen kann man überhaupt entscheiden. Alle anderen sind bereits entschieden.
Oder anders ausgedrückt. In allen Situationen, die man prinzipiell nicht entscheiden kann, muss nur noch aus den verschiedenen vorliegenden Optionen gewählt werden. Das kann ein Maschine, Entscheiden kann sie nicht.
Hat man erst einmal verinnerlicht, was Entscheiden wirklich bedeutet, kann man nicht nur seine Angst ablegen, dass Maschinen uns irgendwann überholen könnten. Es ist auch von immenser Bedeutung, wenn man Unternehmen erfolgreich ins Zeitalter der Digitalisierung transformieren möchte. Ich möchte da Stichworte wie Wandlungsfähigkeit, Kreativität und Innovation in den Ring schmeißen. Aber dazu später in einem fortführenden Post.
Herzliche Grüße
Conny
Bildnachweis
- Beitragsbild: Magnetelektrische Maschinen, Meyers Konversationslexikon, gemeinfrei
- Bilder im Text: © Conny Dethloff, 2015
[…] nun endlich mein zweiter Post auf dieser Plattform, der thematisch und inhaltlich an den ersten Können Maschinen entscheiden? anschließt. Geht man mit dem Fakt einher, das Maschinen nicht entscheiden können, sondern […]
Das ist ein gutes Beispiel, um zu zeigen, dass Maschinen zwar eine gewisse Intelligenz besitzen, die wir den Maschinen aber mitgegeben haben. Die Erklärung mit dem Lernen auf 3 Stufen (wenn ich 0 mitzähle) ist gut nachvollziehbar. Dazu möchte ich noch ergänzen: Maschinen haben keine eigenständige Wahrnehmung und vor allem kein Bewusstsein. Und diese beiden Elemente umfassen nämlich noch unsere Gefühle und die Wahrnehmungskombination die aus Gefühlen und Gedanken entsteht. So entstehen eine Menge subjektiver Wahrnehmungsmöglichkeiten aus denen wieder Entscheidungen und vor allem kreative Impulse entstehen. Das können Maschinen einfach nicht und ich glaube auch nicht, dass wir es jemals hinkriegen werden so eine Maschine zu kreieren. Warum auch, das kann der Mensch einfach besser!